Design Brief
|
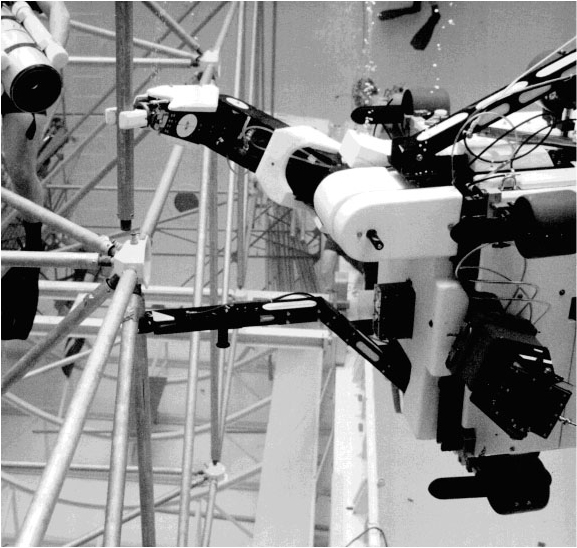
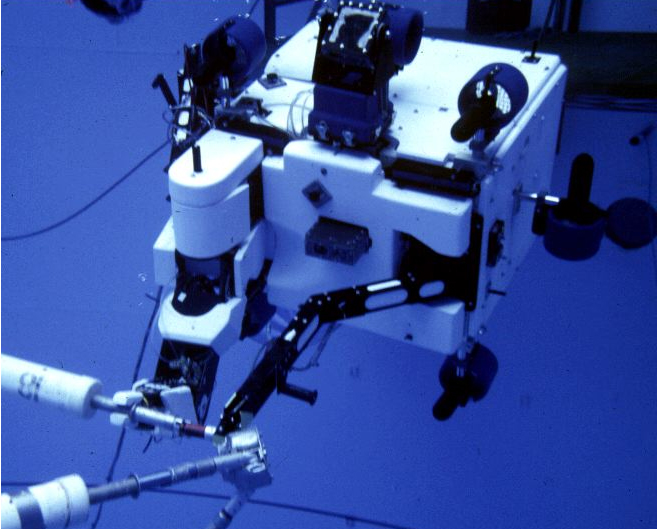
A submersible robot used to simulate on-orbit zero-gravity teleoperated space structure assembly and satellite servicing in neutral buoyancy. |
Client/Sponsor
|
NASA grant to MIT SSL |
Designed & Built |
1982-1986 |
Some history of this project can be found here I worked on this project for 4 years while an undergraduate at MIT. I was involved with the overall chassis design/configuration, robot manipulators, camera pan & tilt, battery box, power system contactors, depolyment systems (cranes, lifting systems) and many other tasks over the years.